پیوندهای سریع
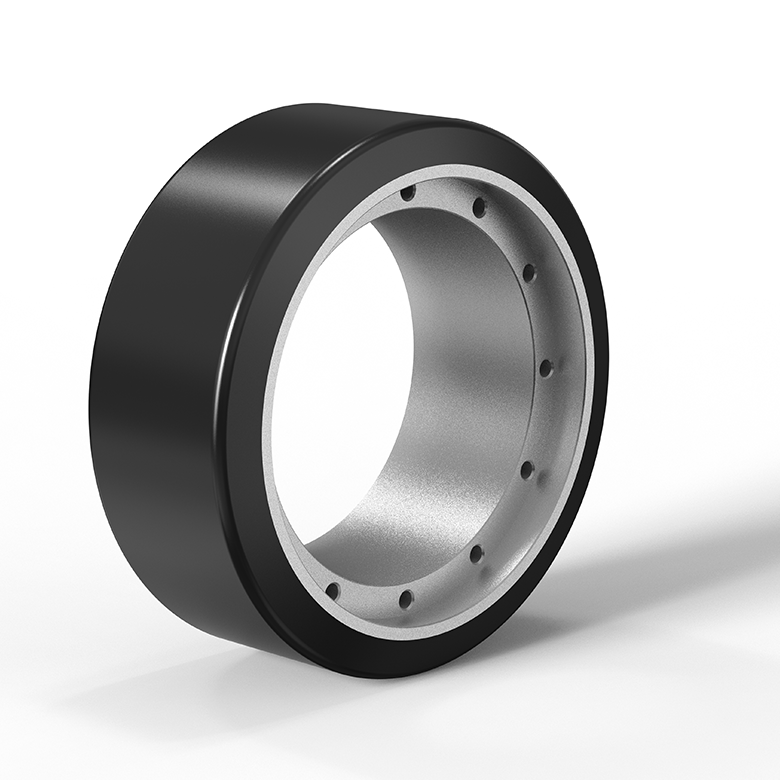
چرخهای مکانوم اغلب در کاربردهای رباتیک استفاده میشوند. برای درک نحوه کارکرد چرخهای مکانوم، فرض کنید یک چرخ عادی دارید که تسمههای آن از جنس لاستیک در محیط چرخ قرار دارند. حال تصور کنید، بهجای اینکه تسمهها صرفا بهصورت مستقیم اطراف چرخ بپیچند، این موضوع باعث میشود چرخهای هانکه مکانوم جالب باشند — تسمهها بهگونهای زاویه دار شدهاند که چرخ بتواند در جهات مختلف حرکت کند.
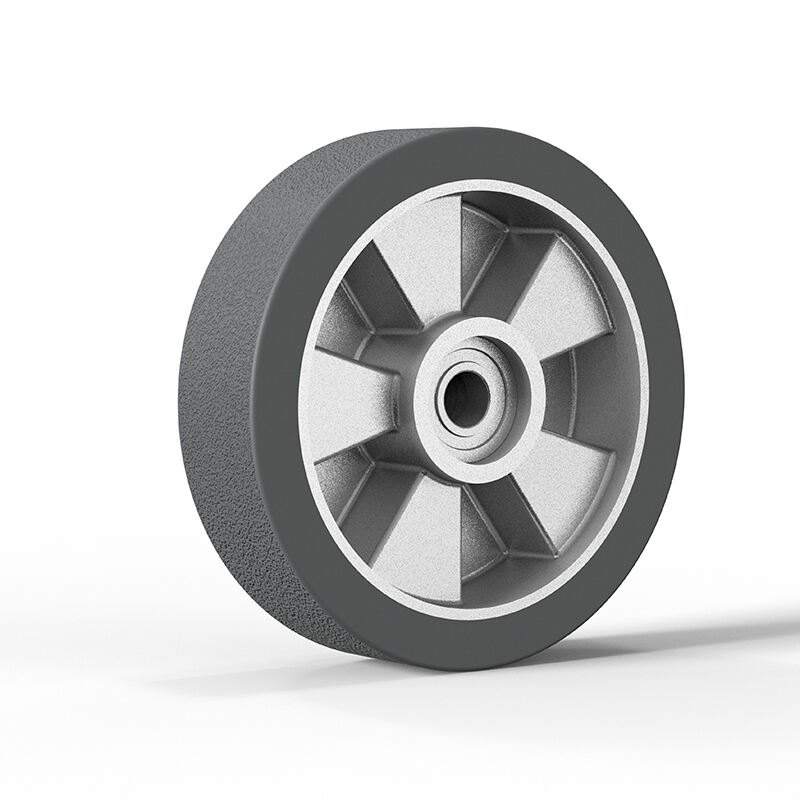
چرخهای مکانوم - چرخهای مکانوم قابلیت حرکت در هر جهتی را دارند که این امر برای سیستمهای محرکه تمامجهته بسیار مفید است. چنین رباتهایی برای فضاهای تنگ یا شرایطی که باید اطراف موانع حرکت کرد، ایدهآل هستند. همچنین این چرخها برای حرکت دقیق، توانایی چرخش در محل و دقت بالا مناسب هستند.
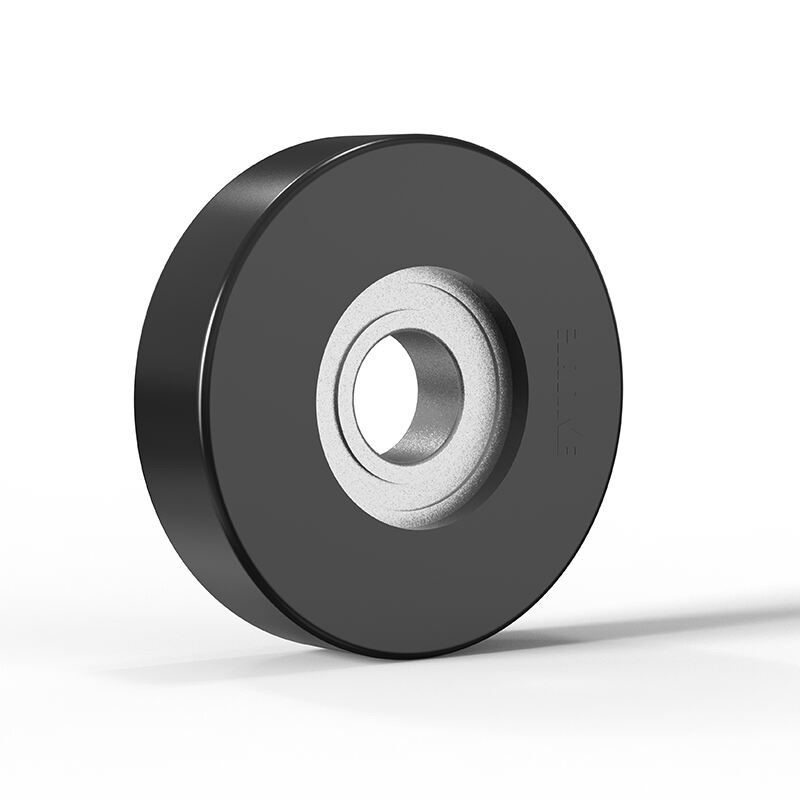
چرخهای مکانوم نیازمند کمی عادت هستند تا بتوانید ربات خود را دقیقاً به شکلی که میخواهید حرکت دهید، اما پس از کمی تمرین و برنامهنویسی مناسب (شامل PID صحیح)، ربات شما در عرض چند لحظه قادر خواهد بود تا با استفاده از ترکیب حرکتهای جلو، عقب، کنارهگیری چپ (یعنی حرکت جانبی) و کنارهگیری راست همراه با چرخش، کنترل بسیار دقیق و روانی روی ربات خود داشته باشید. هنگام برنامهنویسی Hanke چرخهای مکانوم جهتدار کامل باید تعیین کنید که چرخها در چه زاویهای حرکت کنند تا جهت مورد نظر برای حرکت حاصل شود.
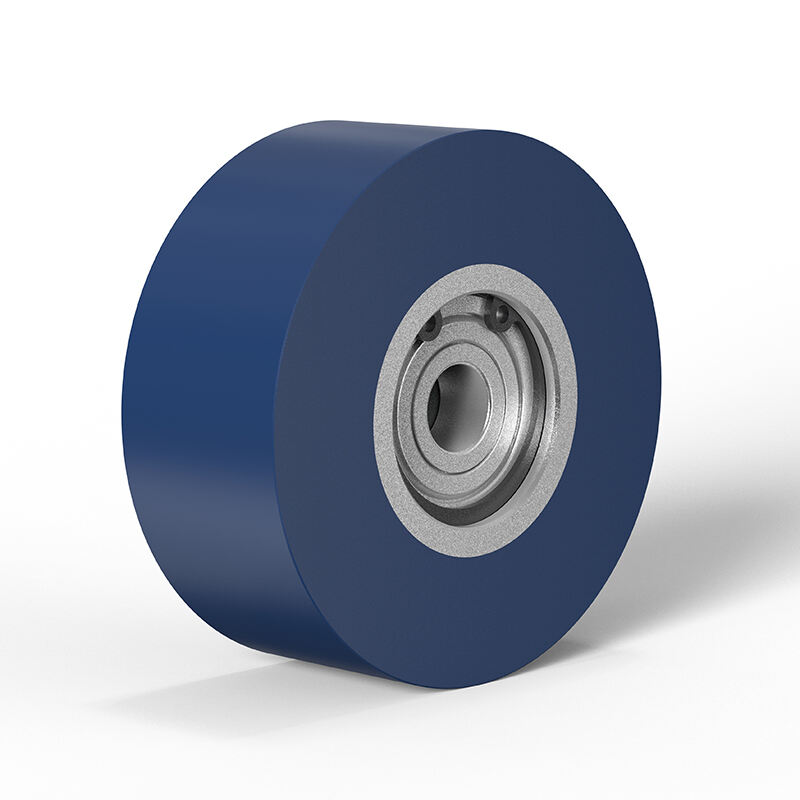
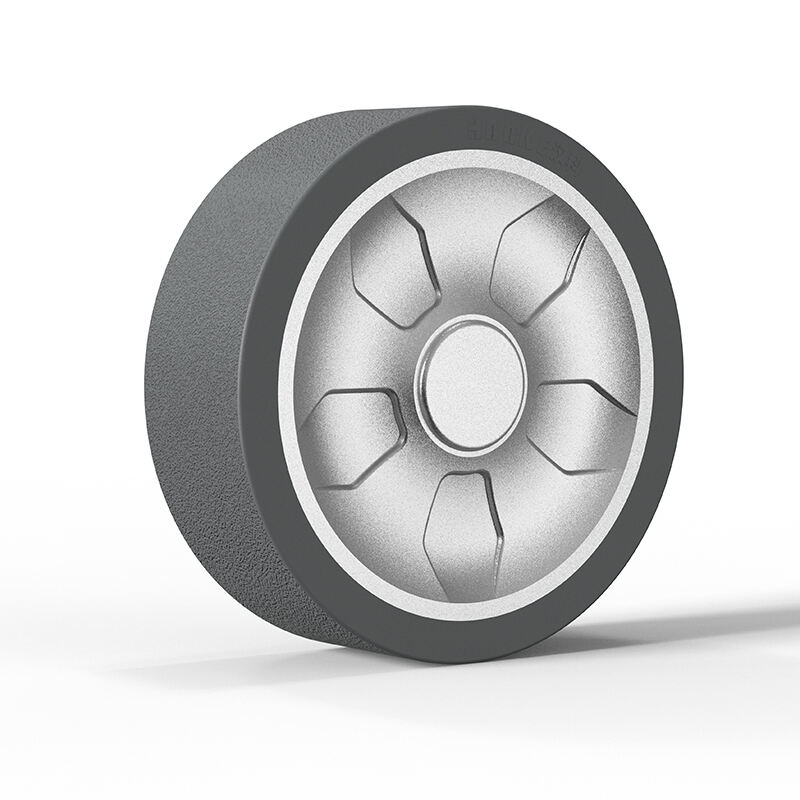
این چرخها فقط برای سطوح داخلی صاف و بدون مانع ساخته نشدهاند — بلکه میتوانند به راحتی از محدوده وسیعی از زمینهای مختلف عبور کنند. چرخهای مکانوم قادرند با زمینهای ناهموار، شن و ماسه و حتی ماسه تطبیق پیدا کنند. این امر آنها را برای سناریوهای رباتیک در فضای باز مانند رباتهای نجات و کشاورزی مناسب میکند.

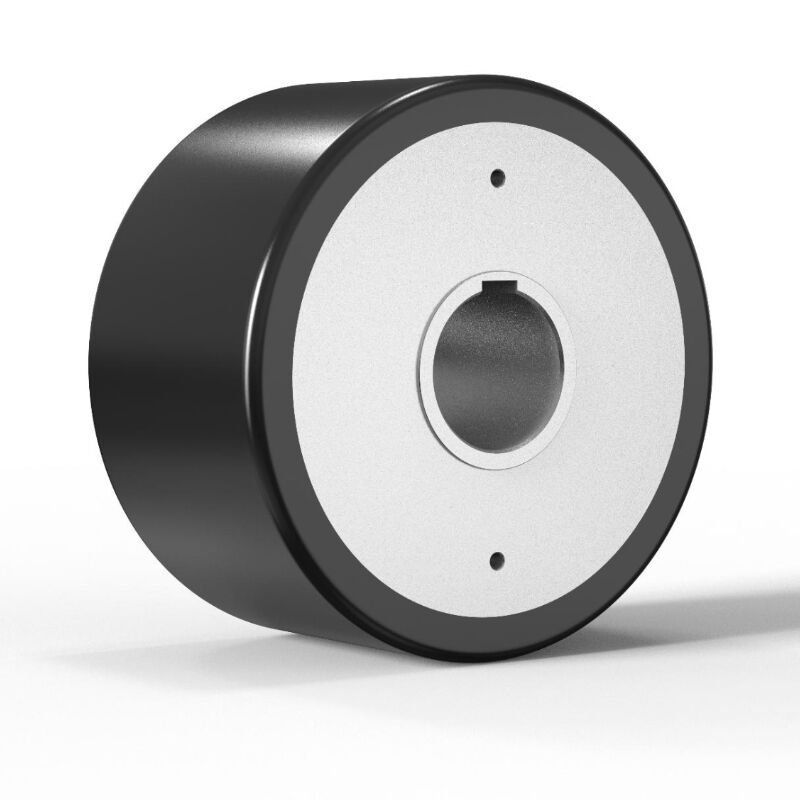
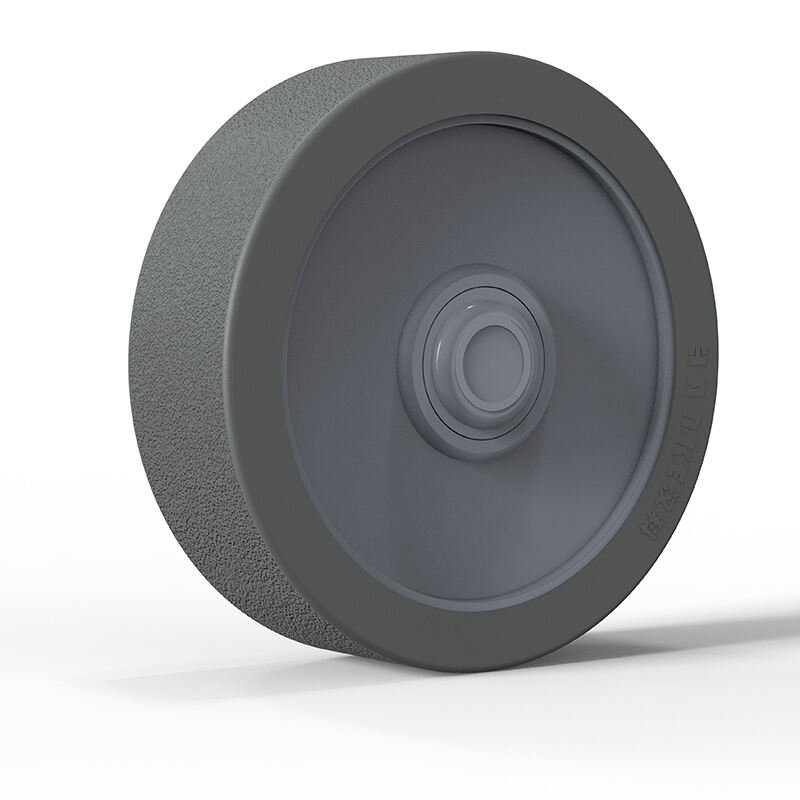
چرخهای مکانوم همانند سایر قطعات مکانیکی نیازمند نگهداری منظم هستند تا بهترین عملکرد را داشته باشند. لاستیکها اغلب بهوسیله گل و لای در رزوهها گرفتار میشوند و مانع از حرکت آزادانه چرخها میشوند. برای جلوگیری از این امر، مراقب باشید که چرخهای هانکه چرخ مکانوم همیشه تمیز نگه داشته شوند و آنها را از نظر سایش قابل مشاهده بازرسی کنید. در نهایت، به موتورها و سیستمهای کنترل دقت کنید — اگر مشکلی در آن قسمتها به وجود آید، ممکن است همانند بستههای تعقیبی شما باشد.
با تعهدی ساده به کیفیت و قیمت مناسب، هدف ما ایجاد روابط بلندمدت و دو طرفه سودآور است که به مشتریان کمک میکند تا از طریق محصولات قابل اعتماد و موفقیت مشترک، رشد پایداری داشته باشند.
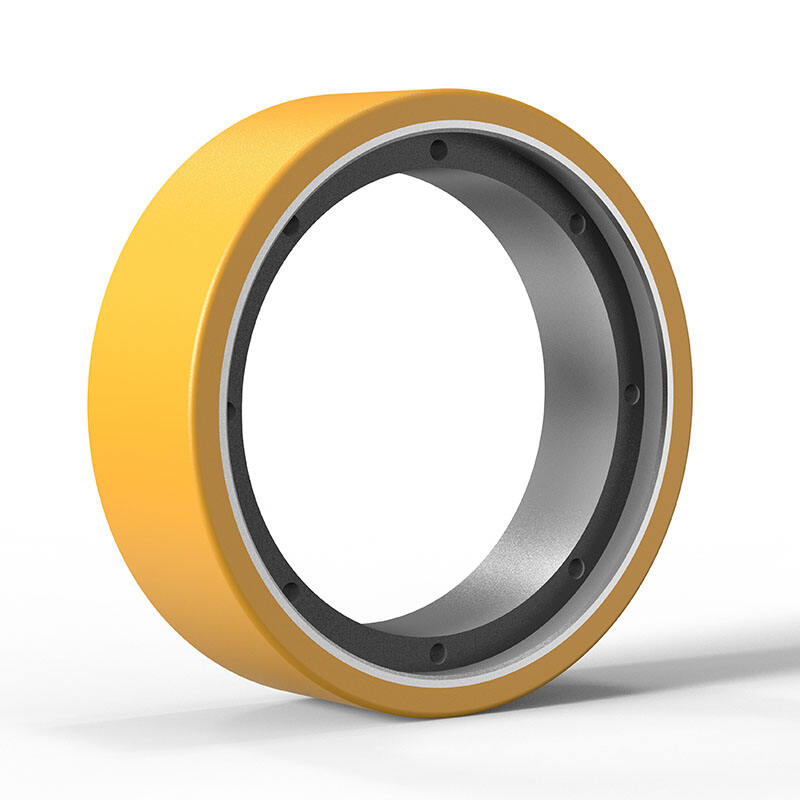
با تأسیس در سال 2019 بهطور خاص برای چرخهای پلیاورتان، هانکه بر روی رفع شکاف کیفیت با برندهای وارداتی تمرکز دارد و غلتکهای با عملکرد بالا را با قیمتهای رقابتی ارائه میدهد تا رقابتپذیری مشتریان در بازار بهبود یابد.
با ریشههایی که به سال 1989 برمیگردد، بنیانگذار ما توسعه اولین دستگاه ریختهگری الاستومر پلیاورتان چین را هدایت کرد و از این رو بیش از سه دهه تخصص فنی عمیقی در زمینه راهحلهای قالبگیری پلیاورتان کسب کردهایم.
ما از تجهیزات پیشرفته، مواد اولیه باکیفیت و فناوری تولید پیچیده بهره میبریم و این امر با یک سیستم مدیریت دقیق همراه است تا تولید کارآمد و با استانداردهای بالای چرخهای پلیاورتان تضمین شود.