Სწრაფი ბმულები
. რობოტისთვის კოლები ფეხების მსგავსად მუშაობს, რათა მოძრაობა შეძლოს...">
Ერთ-ერთი ყველაზე მნიშვნელოვანი კომპონენტი, რასაც ჩვენ ვხედავთ როდესაც რობოტს ვხედავთ მისი არის მოძრაობის გადამისამართლები . რობოტისთვის თვითმბრუნავი მსგავსია ფეხის, რომელიც ეხმარება მოძრაობაში და სამყაროს შესწავლაში. მაგრამ როგორ მუშაობს ეს თვითმბრუნავები? ჩვენ შევისწავლით თუ რა აიძულებს რობოტს იმყოფებოდეს თვითმბრუნავებზე, როგორი სახის თვითმბრუნავები არსებობს რობოტებში და თუ რატომ არის საჭირო რობოტის მოძრაობა.
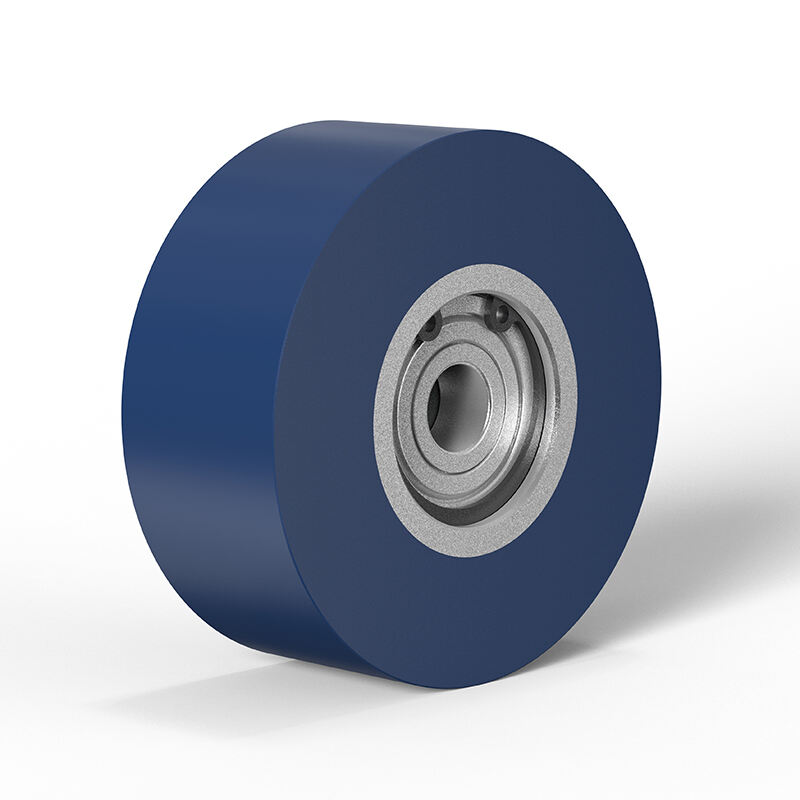
Რობოტის თვითმბრუნავები შეიძლება მარტივად ჩანდეს, მაგრამ ისინი მართლაც ასე არ არიან. თითოეულ თვითმბრუნავში მოტორია მოთავსებული, რომელიც უზრუნველყოფს მის ბრუნვას და მოძრაობას. მოტორი აკავშირებს თვითმბრუნავებს გირების ჯგუფთან, რომლებიც ეხმარებიან მოტორიდან თვითმბრუნავამდე ძალის გადაცემაში. როდესაც მოტორი ბრუნავს, ის აიძულებს გირებს ბრუნვაში, რაც თვითმბრუნავის ბრუნვას იწვევს. ეს კი საშუალებას აძლევს რობოტს ირბინოს და შეცვალოს მიმართულება საჭიროების შესაბამისად.
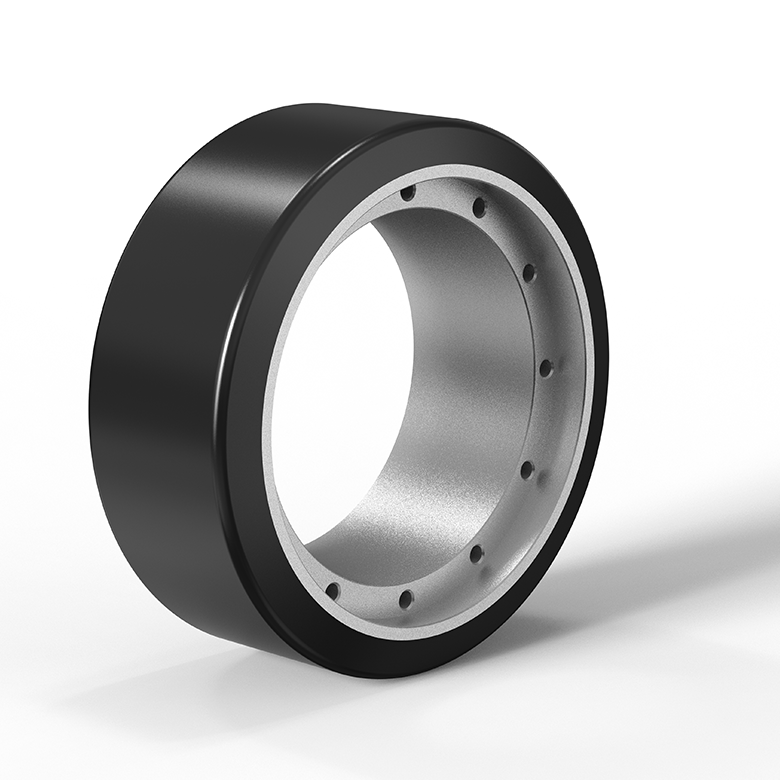
Რობოტებს აქვთ სხვადასხვა სახის გარემო, ასე რომ თითოეულს აქვს თავისი დადებითი და უარყოფითი მხარეები. ზოგი რობოტის გადაადგილება ხდება ან გადასაბიჭვებით, როგორც ტანკის შემთხვევაში, რათა უზრუნველყოს მათ გადაადგილებას უხეშ ტერიტორიაზე. სხვა რობოტები იყენებენ ომნი-ბორბლებს, რომლებზეც განსაკუთრებული როლიკებია განთავსებული გარე კიდეებზე, რაც შესაძლებლობას იძლევა მათ გადაადგილდნენ ნებისმიერი მიმართულებით მოხვევის გარეშე. ზოგი რობოტი კი უზრუნველყოფს სატრანსპორტო საშუალებებს ბორბლების ნაცვლად, რაც უზრუნველყოფს დამატებით სტაბილურობას და მიმაგრებას არათანაბარ ზედაპირებზე.
Გარ Mong გიდის გამტარი რობოტს ვერ გადაადგილდებოდა და მისი გარშემო არსებული გარემოს გამოსახულება ან ამოცანების შესრულება რთული იქნებოდა. რობოტის ბორბლები რობოტის ყველაზე მნიშვნელოვან ნაწილად მიიჩნევა, რადგან ისინი უზრუნველყოფს მის გლუვ და ზუსტ გადაადგილებას. მიუხედავად იმისა, რომ ის გადადის ბრტყელ სარდაფზე თუ ასვლა ხდება ხვრელებზე, რობოტის ბორბლები არის ის, რაც უზრუნველყოფს მის გამოკვლევას და სასარგებლო სამუშაოს შესრულებას.
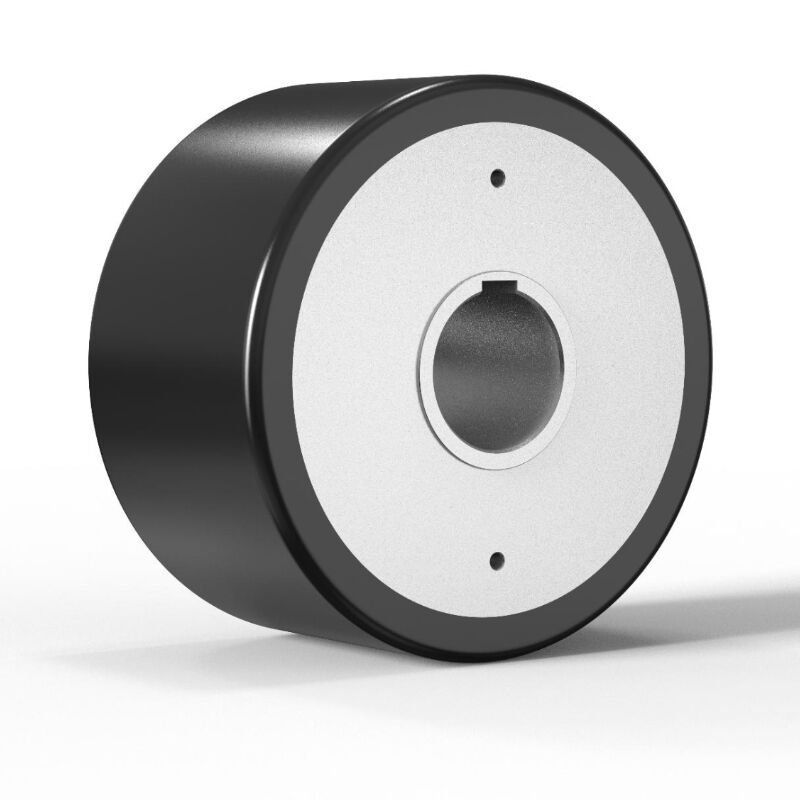
Და ტექნოლოგიების განვითარებასთან ერთად რობოტების ბორბლებიც განვითარდება. ბორბორის მიმმართველი ტექნოლოგიები და დიზაინები უფრო მეტად გავრცელდა რობოტების მოძრაობაში, რადგან სამუშაო ინჟინრები ასრულებენ კვლევებს და დიზაინებს. თავისუფალი განვითარების გამო, როგორიცაა კოლები და გირები მოწყობილი სენსორებით, რომლებიც გზაში მდებარე ბრუნვის წინააღმდეგ აღმოჩნდებიან და რეაგირებენ, სიჩქარე და მიმართულება. სხვა განვითარებებია მსუბუქი კოლები, რომლებიც ენერგიის მოხმარებას ამცირებს და ხარჯს.
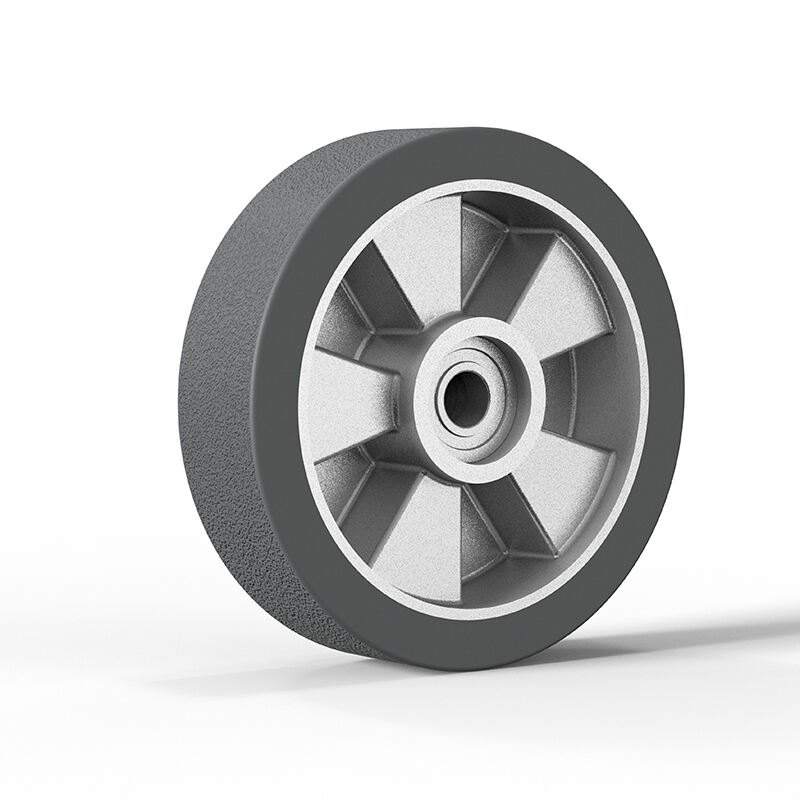
Რობოტის კოლობრივი დიზაინის გარდაქმნა პირველი რობოტების პირველადი კოლობრივი დიზაინებიდან დღევანდელი რობოტების რთულ კოლობრივ დიზაინებამდე, საოცარია ის, თუ რამდენად შორს მივიდა რობოტის კოლობრივი დიზაინები. დღევანდელი რობოტები უფრო მეტ და უკეთ და უფრო მრავალფუნქციურ კოლებს შეიცავს, ვიდრე სადმე ადრე იმას შესაძლებელს ხდიდა. და რადგან ტექნოლოგიის საზღვარს ყოველთვის ვსვამთ, ვინ იცის თუ რა საოცარ კოლობრივ დიზაინებს ვნახავთ მომდევნო წელს?
Ჩვენი დამფუძნებლის მოღვაწეობა 1989 წელს დაიწყო, რომელმაც ჩინეთში პირველი პოლიურეთანის ელასტომერის და cast-ის მანქანის შემუშავება მოახდინა, რაც უზრუნველყოფს ჩვენს მეტოქეებს უკვე უფრო მეტი ვიდრე სამი ათეული წლის განმავლობაში პოლიურეთანის მოლდინგის ამოცანებში ღრმა ტექნიკურ გამოცდილებით.
2019 წელს პოლიურეთანის ბორბლებისთვის სპეციალურად დაარსდა Hanke, რომელიც ამირუდებს ხარისხის სხვაობას იმპორტირებულ ბრენდებთან შედარებით და მიაწოდებს მაღალი სიმძლავრის როლიკებს კონკურენტუნადირებული ფასებით, რათა გააუმჯობინოს მომხმარებლის ბაზრის კონკურენტუნაშინარეობა.
Ხარისხისა და ხელმისაწვდომობის მიმართ მარტივი ვალდებულების მიყოლებით, ჩვენ ვცდილობთ შევქმნათ მდგრადი, უარყოფითი შედეგების გარეშე ურთიერთობები, რათა დავეხმაროთ მომხმარებლებს მდგრადი ზრდის მიღწევაში საიმედო პროდუქტების და საერთო წარმატების საშუალებით.
Ჩვენ გამოვიყენებთ თანამედროვე მოწყობილობებს, მაღალი ხარისხის ნედლეულს და სრულყოფილ წარმოების ტექნოლოგიას, რასაც უზრუნველყოფს მკაცრი მართვის სისტემა, რათა უზრუნველყოფილი იყოს პოლიურეთანის ბორბლების ეფექტური, მაღალი სტანდარტის წარმოება.