Nexus Celeres
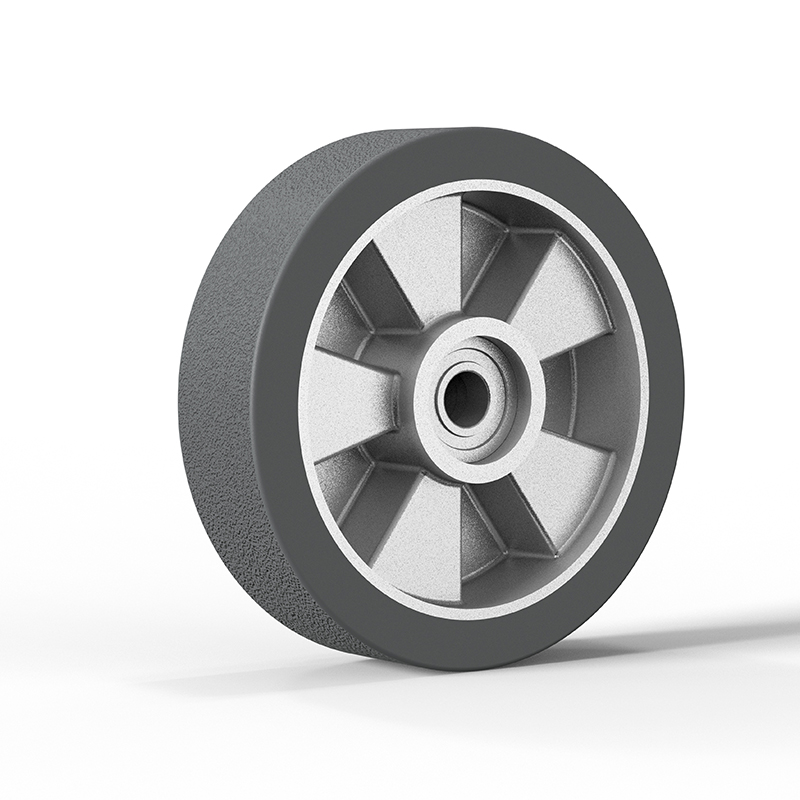
Minutae rotulae robotae permittunt precise movere. Roboti non poterant trans varios et aequales terras movere nec exacte difficilia perficere; ob id agv rotae motus gradatim in re technica necessaria versa sunt.
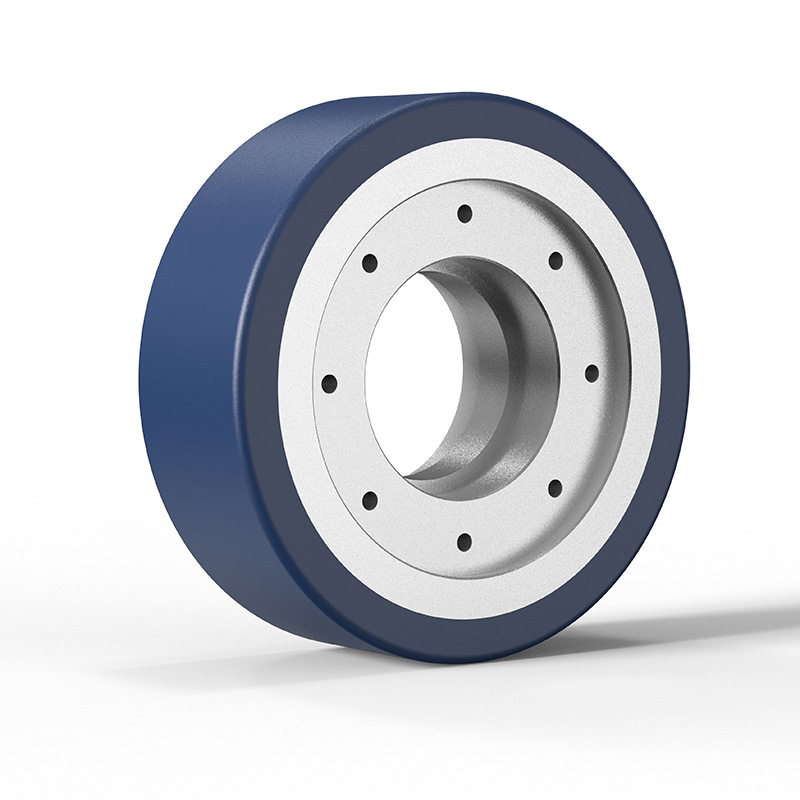
Exempli gratia, rotae robotorum exiguae sunt ad motus praecisimos efficiendos necessariae. Quemadmodum pedes nostri nos cedere et currere sinunt, rotae robotis permittunt ab uno puncto ad aliud moveri, alio nomine mobilitatem. Rota dimensione, forma et materia idonea bene gesta, roboti leniter et accurate moveant, sive in labyrinthe peregrinentur sive sarcinas deferant.
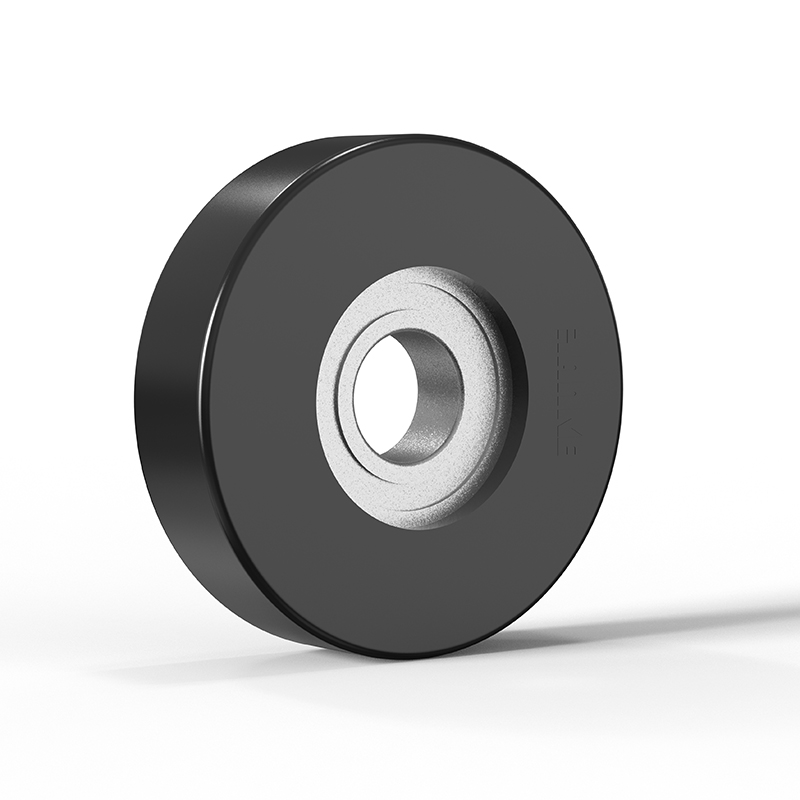
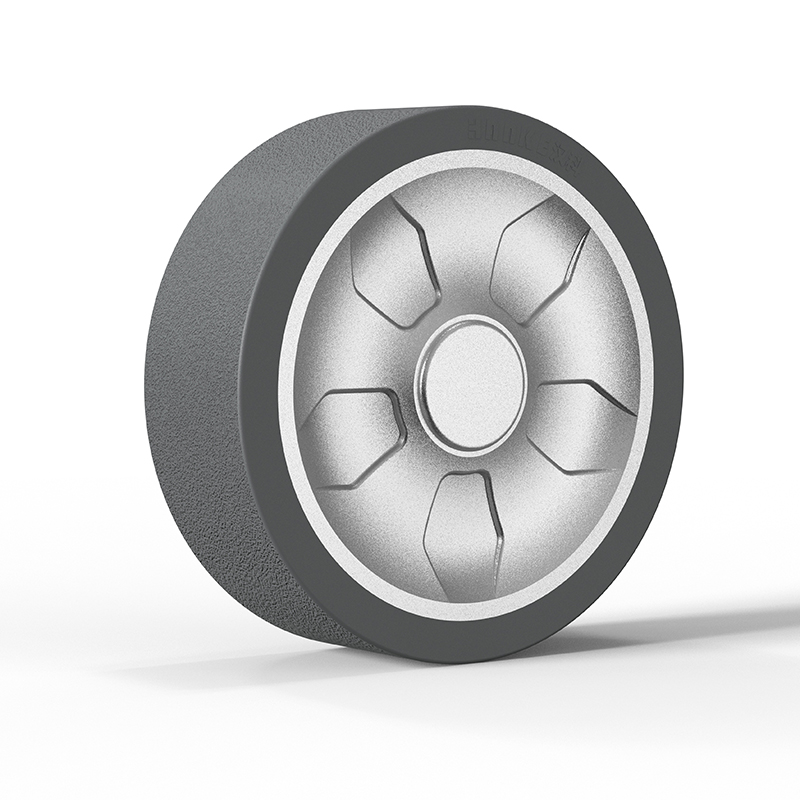
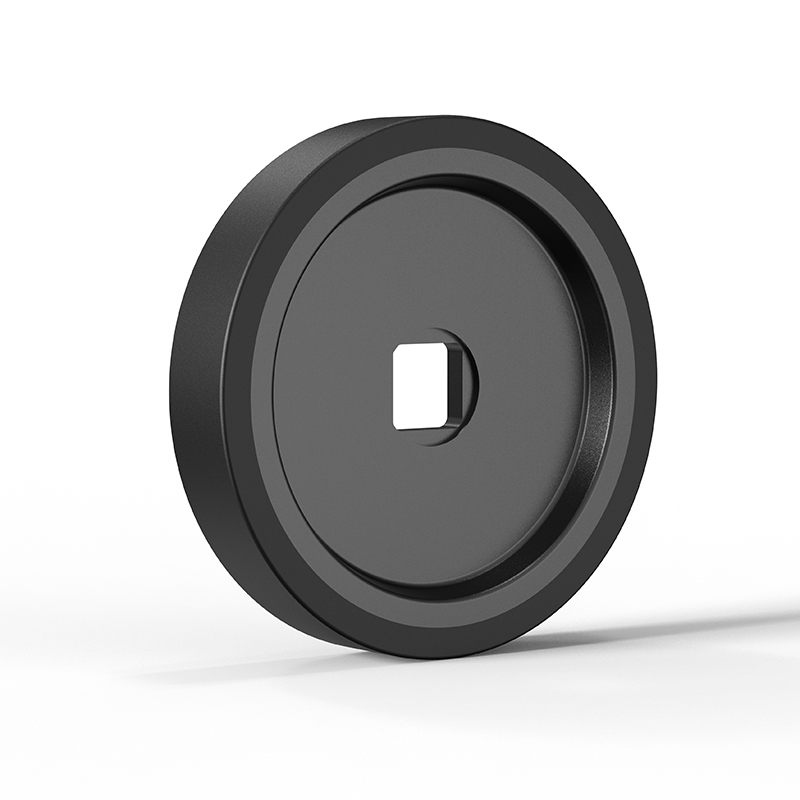
Parva sed valida, haec rota agv ut robotae facile in angustiis et in complicatis regionibus progredi possint. Haec rotae sunt quasi pediludia velocia et expedita, quae celeriter circa impedimenta currere et munera perficere possunt. Propter rotae parvas robotae in regionibus novis ambulare et celeriter ad conditiones mutantias respondere possunt.
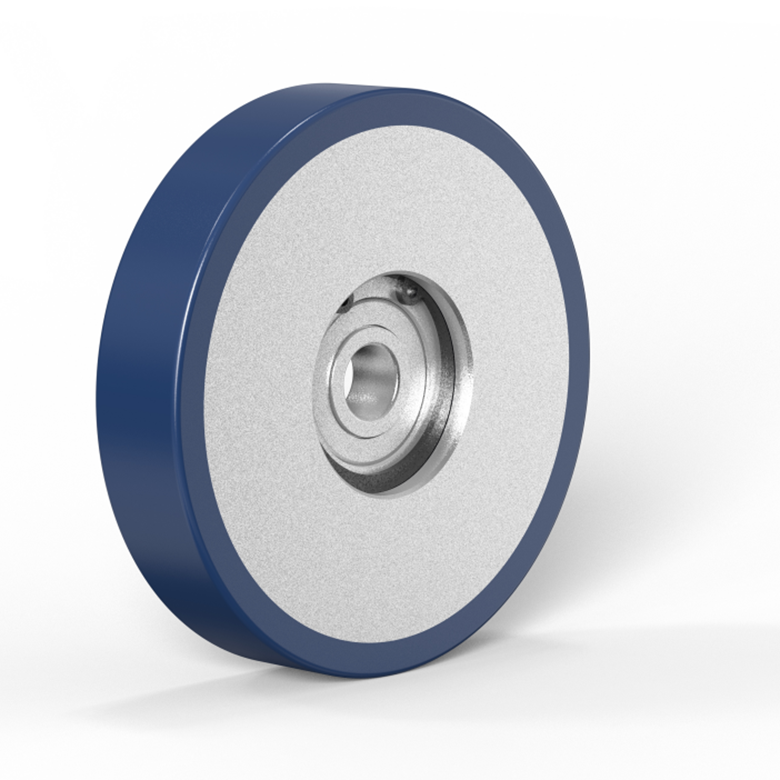
Evolutio rotae parvae pro robotis per annos multos viam aperuit ad varia requisita applicationum roboticarum. Rota parva a simplici forma, quae solummodo in directum volvitur, ad ea quae sensoribus et motoribus referta sunt progressa est. rota tergum decade praeterita ad optimizandum et reengineering durabilitatem, ad efficientius currendum et cum diversis robotis combinandum prosecuta est.
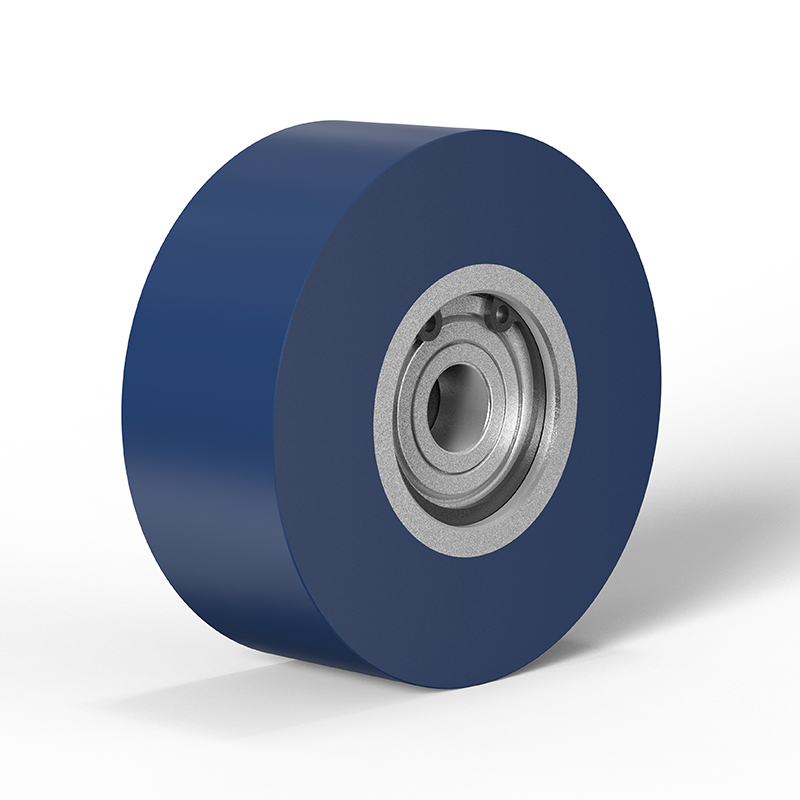
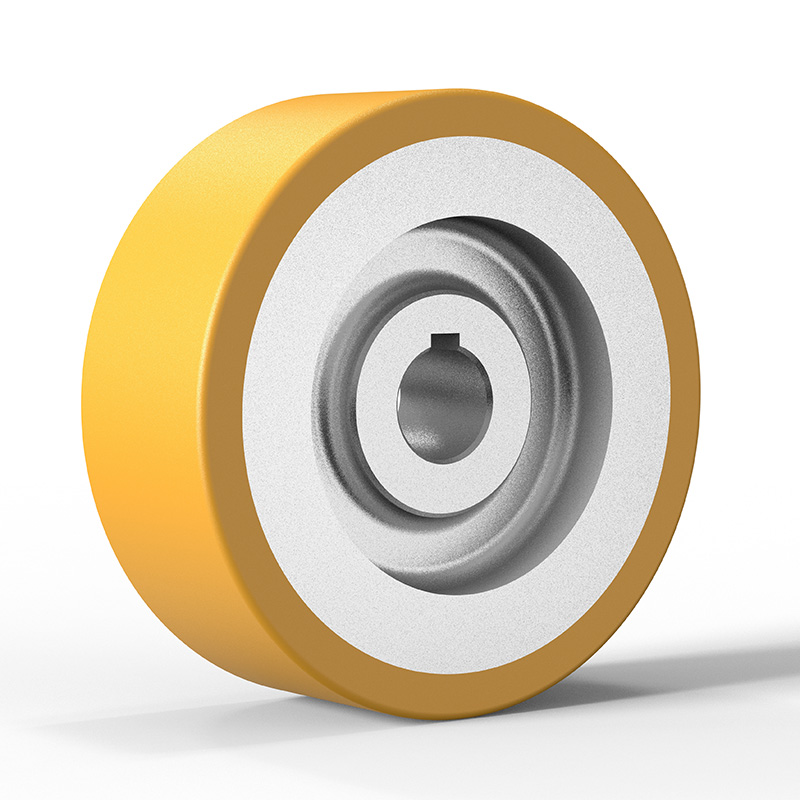
Haec est rota parva specialis pro motibus roboticis ad usus specificos et locos certos. Quedam robotae praeferebant rota AGV cum dentibus ad magis prehensionem in superficiebus inaequalibus, et quibusdam oportet rotas omnidirectionales habere, ut omni directione leter operentur. Hoc efficit ut robotae in officiis suis efficientiores sint et multo amplius quam unam rem specificam facere possint, quaecumque intra facultates earum sint.
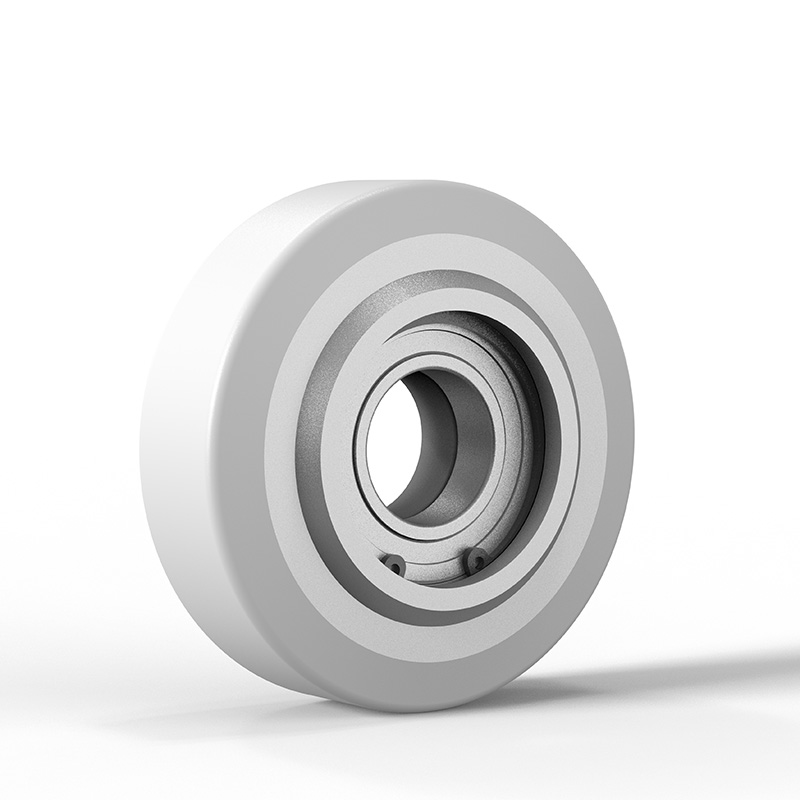
Aliqua consideranda sunt cum idoneas parvas rotas pro tuo miniroboto eligis. Primum considerandum est dimensiones et pondus robotae praescribent quae magnitudo rotarum iuvare et impellere potest. Noli oblivisci, etiam considerare oportet terrain qua robotus movebitur, ut habeat idoneas rota motrix AGV pro unaquaque superficie laboris.
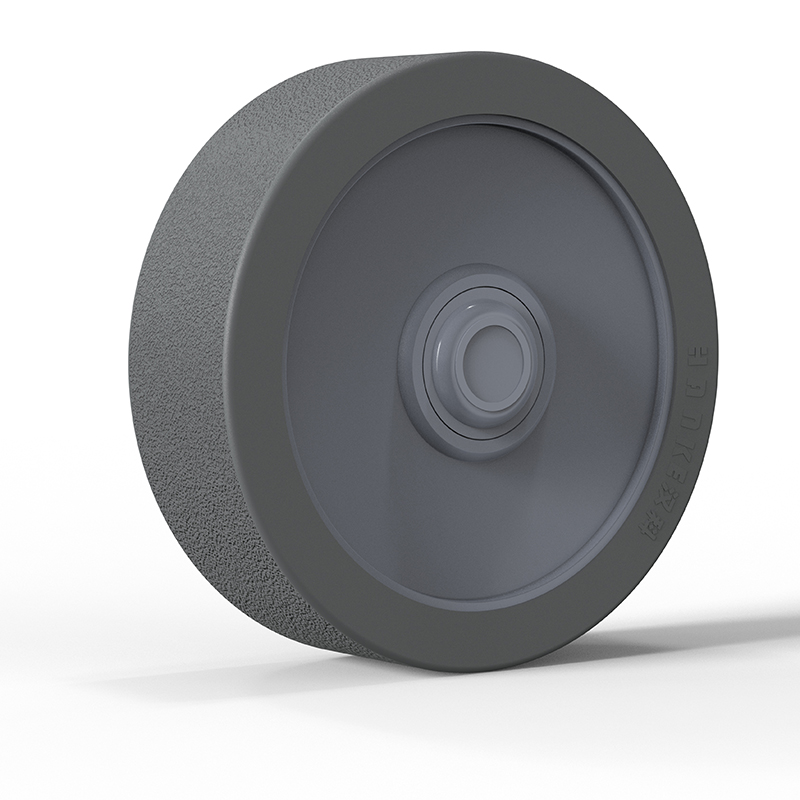
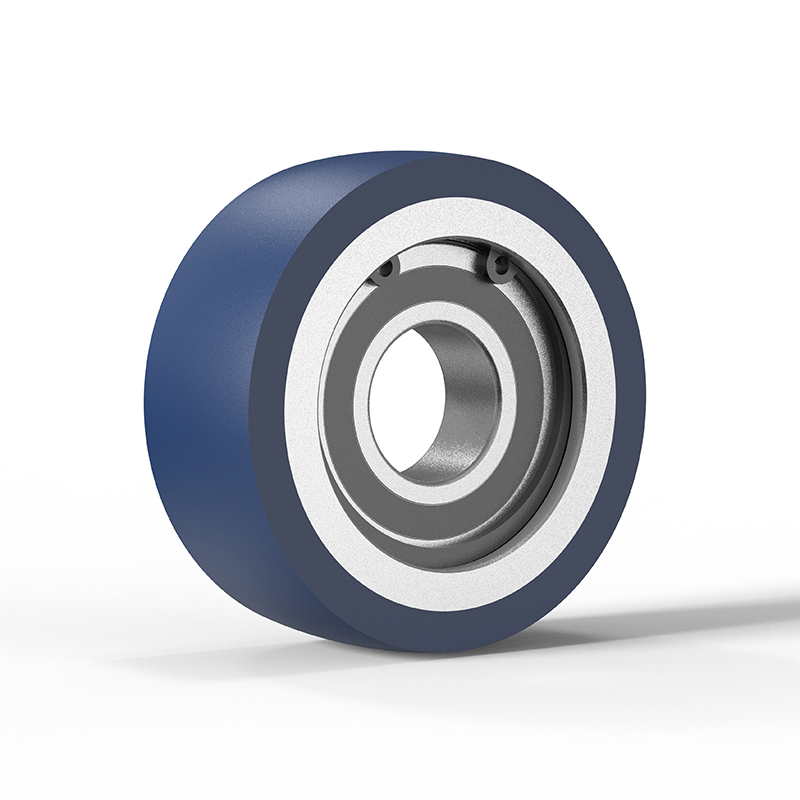
Instrumenta perita, materias primas optimas et technologiam productionis subtiliter elaboratam adhibemus, quae a systemate gestionis rigido suffulcitur, ut fabricatio rotarum ex polyurethano efficiens et secundum normas altas certificetur.
Ab anno 2019 constituta speciatim pro rotis ex polyurethano, Hanke intendit aequandum cum generibus importatis, offerens rotulas alti perficientiae pretiis competitivis ut competitivitatem mercatalis clientium augescat.
Cum radicibus retroactis usque ad annum 1989, conditor noster duxit evolutionem primaevae machinae fusoriae elastomerorum ex polyurethano in Sinis, ita nobis plus quam triginta annos experientiae technicae profundae in solutionibus formandis ex polyurethano tribuens.
Ducimur simplici promissione qualitatis et pretii moderati, nitimurque perpetuas relationes mutuo proficuas aedificare, adiuvantes clientes ut consequantur incrementum durabile per producta fida et communem successum.